Integrated Mechatronic
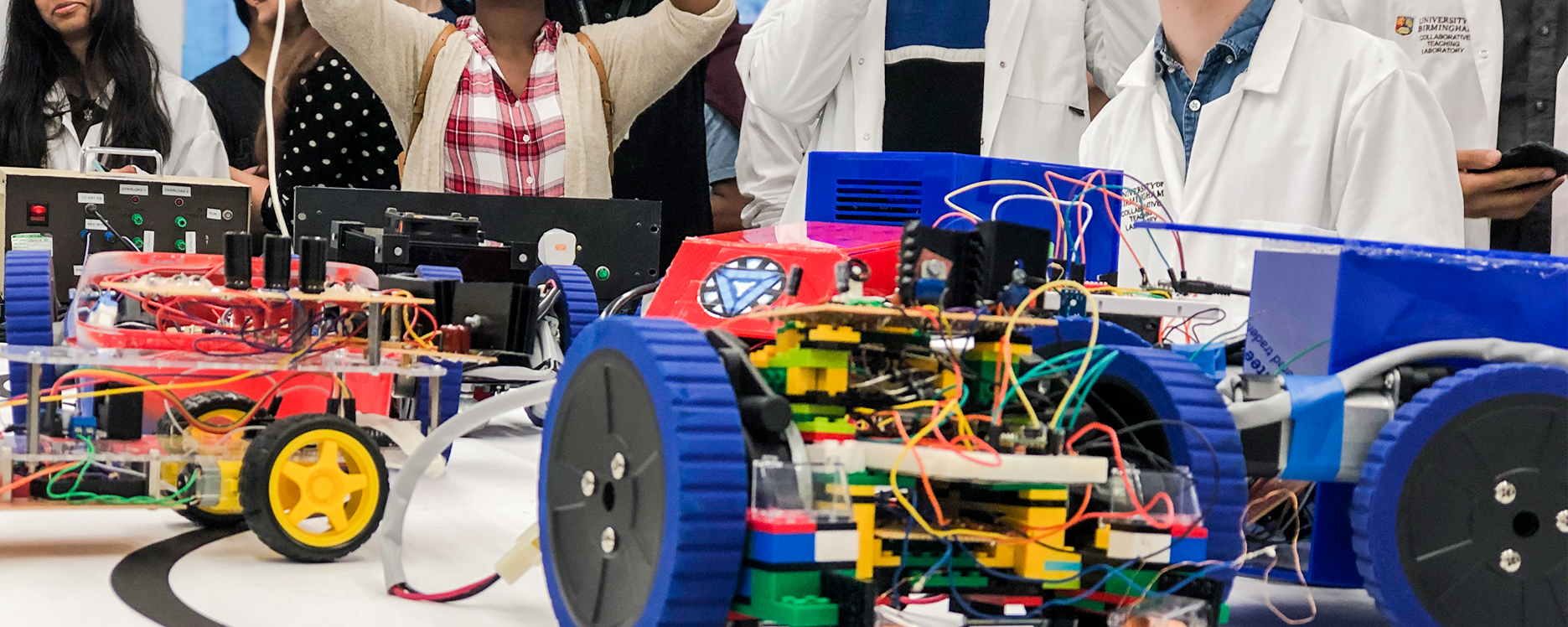
End of the first year in Birmingham, I finished an integrated mechatronic project with my groupmate to build a wire-following autonomous vehicle.
在伯明翰的第一年,我和组员完成了一个综合机电项目:做一辆巡线小车。

The vehicle frame was built by LEGO. The coils in the front of the vehicle detect the distance to the line. The microprocessor we used was PIC 18f27k40. A more than one thousand line C program code was written in this project.
车身的框架是用乐高搭建的。在车头的两个线圈用来检测车辆与巡线的距离。我们使用的单片机是 PIC 18f27k4 ,并为其编写了超过1000行的 C语言 代码。

The whole vehicle contains a very large number of modules: power modules, analogue-to-digital conversion modules, etc. Each module has undergone a lengthy design and debuging process. So the details are not all shown here. The video below shows the commissioning process of how the coil controlls wheel speed.
整个小车包含了非常多的模块:动力模块,模数转换模块,等等。每一个模块均经过了漫长的设计和调试,就不在这里一一展示了。下方的视频展示了线圈控制车轮转速的调试过程。